业余爱好
自我介绍一下,我有三个业余爱好:
一是打篮球,从文革小学停课开始到现在没断过,水平当然还凑合。篮球的重要性是给人带来快乐和向上的精神。和人打篮球,不用说话就可读到他人的脾气和性格,很灵的;
二是酷爱车,从自行车开始到摩托车,再后来从微面、轿车到越野车,一路爱好过来,从心仪到拥有,可以说乐此不疲,车几乎渗入许多男人的血液中;
三是摄影,从80年拥有一台海鸥205开始就常常琢磨相机和拍片,由于喜欢器械所以酷爱相机等器材甚过于拍片本身,可谓是不务正业啊,也就是器材发烧友。
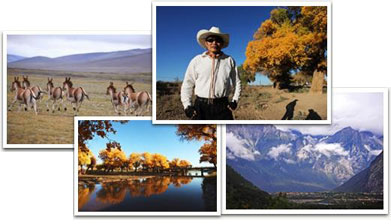
若把后两个爱好加在一起呢?拿着相机开车出去拍片真是享受。生在中国真好,地域广阔南北迥异,美景无数(若生在加勒比小岛国还不让憋死哈)。旁边贴几张PP请大家赏眼。
专业爱好
还有一个专业爱好,就是设备改造。实际上这个专业爱好与业余爱好有着千丝万缕的连系,同承一脉。由于从事工业领域,遇到各种多样的设备,常常企图将接触到的设备改造一下,一是可以克服缺陷、提高设备性能,二是有成就感。象我们用的电视机或汽车这样的经典商品,可以改造的可能性很小,因为利益驱使,它们背后有着成千上万的中外工程师团队在研究、在创新。而工业上遇到的许多专业设备由于保有量小、门类庞杂,创新利益空间不大,所以这个领域的多种设备都有很大的创新空间。混合机就属于这样的设备。
为什么要创新混合机
我使用混合机十多年了,由于我们要混合的粉料混合要求特别高,选用混合机颇费周折。
后来选大家常用的V型机,通过长期使用发现它有许多问题:
1、混合效率低、混合时间长---因为它是利用空间颠倒使粉体对流原理混料 (注:我们混合金属粉用时24小时);
2、轻质粉与重质粉不易混合充分;
3、动力有效利用率低,因为它的转动部件重心转矩大,重心距轴远,并且运动时转距交变不定,运转动时多数能量损耗在克服重力的举升运动上了;
4、效空间利用率低,正常使用时只能用整个容器的40%有效容积,比如1000升V型机只能用400升有效容积来混料,如果装到50%、60%则混合效果大打折扣!
另外市场上推宠的三维混合机问题更多:
1、设备运动不连续,运转时会瞬间转动和停止,还要改变运动方向,造成更大的能源损耗和冲击载荷,比V型机相同规格多费电60%;
2、于其运转特性会对设备机件冲击很大,这样加大了各机件尺寸,增加了制造成本以及后期维护成本;
3、同样有混合效率低和轻、重粉不易混合等缺点。
眼前使用的混合机有这么多问题,同时又找不到其它的理想设备,粉料混合工作又不易顺利完成,怎么办?只有靠我们自己了,让我们来创新吧!
新型混合机的设计思想指导
新型混合机的设计指导思想是:发扬V型机、三维机无死角的优点,克服它们的混料效率低等上述缺点,要求新型混合机具有(1)混合质量好;(2)混合效率高;(3)节能降耗等等先进性能。
通过我们金泰公司技术团队的集体智慧和不懈的努力,一个全新的设计方案诞生了。
(1) 采用横置两端双锥型回转体料桶,这样桶体紧凑还可以利用二端锥体的倾斜角,方便中部出料口出料。
(2) 在料桶两端安置外向斜插式水平转轴约束料桶运动,运转时料桶的两端高低起伏,使桶内粉体实现左右大方向对流加径向连续滚动,既可以混合粉体同时还可以消除桶内死角。
(3) 在回转型料桶内加入沿桶内回转轴转动的多组叶片,其转速快于料桶转速,用于穿插搅动粉体,使粉体内部快速充分混合。并且这是全尺寸搅动叶片其活动范围可到桶壁任何一处,效率非常高;另外搅动叶片分两层四个方向多达八片,转速为中低速,这样既可以保护粉体的颗粒形状壁免受到强力冲击,又能迅速混合提高混合效率。
(4)设备运转时料桶围绕外置斜轴转动,桶内叶片组也转动,二者不同方向也不同转速。也就是说叶片组是在一个三维空间中作公转的轴上又作自转,整个运动高效而又复杂。
这是一个具有创造性的全新方案,在混合机行业中是一个创举。以前也有厂家在V型机中心轴附近加装小尺寸叶片,由于受到V型料桶的局限其转动空间非常小,而且位置在中心部位接触粉体时间很短,所以效果甚微。
通过用这种方案制做出混合机的实际检测和使用,证实了这种方案的先进性,和目前市场上使用的任何一款混合机相比,在混合效率、节能和混合难点上(如轻粉重粉不易充分混合)都有着很大的优势。
另一个梦想
我还有一个梦想,几年了一直有一个念头,想做一个可以骑行的“机械马”,利用目前镁合金新材料和高容量电池等新技术让马轻松走起来,同时还可以骑上人,挎个包去买菜呢。
我已经有了许多构思,有些自认为还不错,但绝对不成熟。平时事物性事情太多,我幻想有个长空儿让我能动动手就太好了。
问题一:说是马有些牵强,因为吃草的马膝关节前后不一样,前膝向前弯曲,后膝向后弯曲,不好做。吃肉的狮子和狗、猫的膝关节前后一样都向后弯曲,好做。为了方便很可能会选用后者的结构。
问题二:骑马会颠泊起伏,这是因为摆腿会使支点一高一低波动,骑着不舒服;那么我们的马要平稳行走,越平稳越好,骑上去会胜过真马。
问题三:用一套动力联动会很烦,机械结结构付出代价太大。我们准备选用“四轮(蹄)驱动”、“独立悬挂”哈。
问题四: 马的运动方式大体有三种常用的形式:一是慢走,四蹄轮换顺序迈行,大多数情况只有一蹄悬空;二是慢跑,二组对称的蹄子几乎同步迈行,交替往复,大多数情况是二蹄悬空;三是奔跑,前后二组蹄子分步前跃奔跑,几乎一半时间四蹄悬空;后两种运动的平衡问题很难解决,只能先做第一种运动了,“走”!